

This is a research into how basic shapes
form larger and more complicated systems by
replicating & spinning.
Look around.
The pen you hold consists of smaller plastic pieces & refill ink;
This computer is assembled with hundreds of electronic components;
Wood is fibers clustering around; Soil is huddled clay particles;
Our human body is made of organs, organs of tissues, of cells, proteins...
It seems everything in the macro world, animate or inanimate,
can be broken into its constituent parts.
If we assume this world is nothing but a huge number of fundamental parts
and their combinations,
What rules their composition?
Or is there a rule?

Break Down & Transform
For example, here we dissemble an SLR camera to its minimum components.



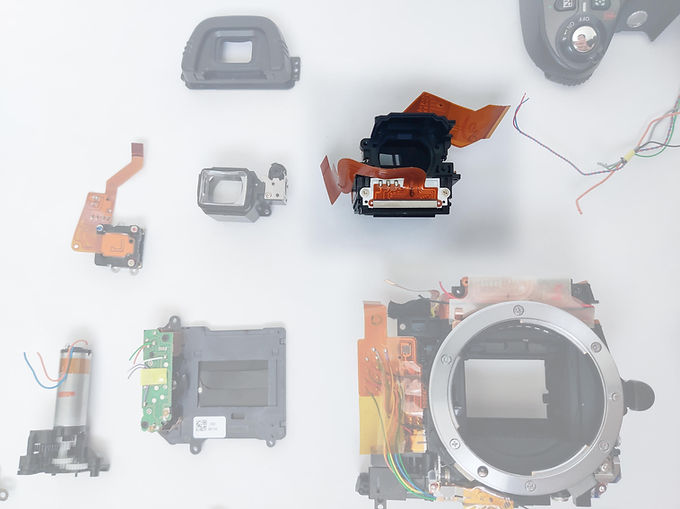

They look like some 3D blocks, sticks, slices and windows of vaious shapes and sizes.
But if we did a homeomorphic re-shaping, they would be equivalent to a combination of 13 balls, 5 donuts, 2 two-hole donuts, 1 three-hole donut, 4 four-hole donuts, 1 five-hole donut, as below:

This is how we view them topologically, just a perspective.
Although most of them don’t look like their actual shapes in 3D world at all, and functionally the camera would never work again if they are shaped this way.
But what if we stay with this perspective for a while and browse the world around,
when the relationship between each individual matters more than the specific tangible shape of them?
There would be millions of similar 'balls' and 'donuts' we see!
Together how do they weave this universe?
From here, my study turned to a journey of topology exploration.
Experiment With Strip
As we know, when we bend a strip, flip it half round and connect both ends, we have a Mobius strip:

If we condense the flipping operation to one point, until it becomes extreme foldings, a knot can be made .
It can be a triangle, quadrilateral, pentagon...or an N-polygon-shaped knot, depending on by what angles we fold it. The larger the angles, the larger the value of N and the relative size of knot become. The value of N also affects how many rounds the strip flips ( it's a typical mobius strip only when it flips half round ). It’s not necessarily a regular N-polygon knot, but here let’s make regular ones to study.
Thus the strip will be divided by (N+1) foldings, into N pieces of triangles. In regular shape case, those are all identical isosceles triangles. I will stay with the most typical example, the 45°-triangle division.






As it creates square knots, we can repeat the foldings until they are all over the strip.
loose it and follow the trace, it can be transformed it into a chain.
The chain is made up of mere repetition of identical isosceles right triangles.
A longer version:
= * 36

It has some quite charming qualities.
Let's name it Chain-1 for now.

Qualities of Chain-1
Reproduction
By merely self replicating and spinning of one basic shape, it grows and spreads as far as it goes.
Variable structures
It changes structure by the way it folds.




More complicated structures can be achieved, when multiple chains are connected to build larger systems:



cross discipline with: Chemistry / Biology / Architecture / Decentralisation / Data network
Self-blocking
It works as a single helix or double helix, twists to embrace itself.
Spinned in different directions, it can tighten or loosen.

Inspired by this quality, another project of mine tries to create special micro structure of material, for it to show variable dynamic characters on macro scale.
Learn more about project: Turn & Up.

Also Inspired by this quality, I designed and developed the toy White Tulip that can be spinned to open or close.
View in webshop: White Tulip.
Cross discipline with: Fabrics / Material anisotropy
All direction surface
The surface of the chain goes round and round, constantly changing the direction it faces.
It's a natural guide for fluid and light.
Cross discipline with: Optics / Hydrodynamics
Inside - outside
It creates a clear boundary between the inside and outside space.
It can work as a shell, while the boundary can change its shape.
Application: Packaging
Cases of other basic shapes
Chain-1 was a self-replication of 45°-right-tiangle. What do other basic shapes do?
If we stay focused on triangle shape, but allow it to change the size when copying itself, we will have a series of analogues. Connected, they become a strip growing exponentially, as for the length and the area it takes.

What do they look like to you?
They remind me of many kinds of creatures on this planet.



More random shapes?
Now let's go further than triangles.
I drew a random quadrilateral and pentagon, picked two sides as linkage sides, copied and spinned to connect.
The chains go like following.






With no doubt, when we fold these chains, their units don't fit into each other like gears, as those of Chain-1 do. They have conflict with each other. But surprisingly somehow they always find their own ways clustering around, and spread as groups!
I would say microscopically each shape, with each pattern of linkage, has its characteristic way of growing, forming unique trace to reach out. That's decided by the angle of the linking sides and the shape itself.
On a macro scale, on the other hand, when we zoom out enough, the specific shape of each unit doesn't matter and they are simplified to nothing but dots to the universe, only the relationship and behaviour of each one makes sense, which is self-replicating and spinning.
2D to 3D
Can we also find a 3D basic shapes, so it can grow all directions and get concrete?


?

I started with using several strips of Chain-1 to cover a 3D stick.


The skin opens and closes with rotation of two ends, showing a beautiful gradient pattern.
I tested with sticks of different intersections.

In this test piece, I made the chain units popping out to be more 3D.
Then I tried cutting along the trace on the skin, but really through the cube.
There came the first 3D basic shape. It takes 8 copies of them to assemble a cube unit, 32 to build this octopus-like syestem.



Another test was composed on a cylinder, cutting along the curved surface of spirals. It's different from the result of cube test in that the boundary surface between each unit is continuous curved surface, and the linkage is not straight line but curved. Changing the slope of the spirals, we would have different results.


We can imagine from here, that there could be countless basics shapes with all kinds of details, as long as formed by a certain rule, that can forge perfectly into larger shapes.




Not only can this Chain-octopus stand straight like a true octopus (with only 4 legs though :D), it can lie down, twist its basic units on the legs and transform its shape. This shares a similar quality of Chain-1, its 2D version.
Again, when we zoom out enough, we can imagine the specific 3D shape of the basic units doesn't make any difference. It can be cubes, sylinders, pyramids, but after replicating and spinning, they would spread and transform into various of mass shapes, and occupy a 3D space.
Octo-passengers
The operation of replication was already so metaphorical as forming macromolecular organic matters or reproduction of cells. Chain-1 reminds me of tree branches. Chain-octopus even stands like a living creature.
While each chain is a mass replication of the fundamental unit, wouldn't multiple chains form a higher and more complicated system? Would a group of my chain-octopuses work as a tangible model of a community of a species? This leads the subject from micro morphogenesis to macro population study.

As a test, I set up some strings through chain-octopus's legs, to make the movement controllable, so that we might be able to study the most common behavior of creatures, moving.
Unfortunately there was too much fraction everywhere, while each unit along the legs is a variant, whose spinning affects the shape of the whole. The robot needs too much control, didn't work as I wished.

I reduced the chain from 4 layers to 1 layer and cut it half high, to minimize the variants. Now I have a mini octopus made up of 8 identical basic units. It looks just like a bug. Bravo.
I call it "Octo-passenger".
My first idea was to mimic flocking behaviour.
Based on the three basic rules of flocking behaviour, I made a simplified model for demonstration.
This shows the idea of separation, alignment, cohesion of each individual in a flock.

I started to develop a group of robots. Each of them moving around on its own, while there is a certain bind between each other, so that an individual's action affects the surrounding ones.
I want each octo-passenger to make no complex decision, but only focuses on moving, so that we can see the flocking behavior as group strategy.




I realized the moving part by applying a linear motor to drive a disc. The tip on the disc flips the legs when rotating, causing the robot to move slightly around by the fraction of the legs against the ground.

The interaction of octo-passengers is introduced by the magnets hiding under the legs' skin. There can be pushing and pulling interaction between each side of two squared robots.
Individual difference was further gifted to octo-passengers, by applying motors of different ratio, adding weight, or changing the material of the ground surface, simulating more situations that might occur in a flock of reality.
A line of magnets were also setup under the ground, to idealy creat a magnetic field around the area.
After moving for a while, some octo-passengers start to connect and move as a couple, some exile itself from the group, some stop working early in their lives, some keep moving only in a short range area.
The typical pattern of "flocking behaviour" was not detected, probably because the magnets were still too weak, but the the group movement was great fun to watch, and brings a connection to real life perception.


So far this project has not yet rushed to offer conclusions how our universe works, although I'd very much love to. But I know it would be too hasty and careless. It's more about observing, imagining, proving and exploring.
As I mentioned, it's an inter-disciplinary study, that I believe can contribute to Biology, Chemistry, Architecture, Sociology, Economy, Data network etc.
To me the beauty of geometry and mystery of topology is hiding in every creature of nature. To take a glimpse of it, to tell a story of the beauty, to share the surprise of discovery is all it's about. If any thoughts are provoked because of it, that would be my little value and great pleasure.
I labelled this project as 'Ongoing', which means I will share any new finding or progress on this page.

Rethinking about Chain-1
2023.4

How do we usually describe a mobius strip?
"Take two ends of a strip by long side, twist one of them half round and connect", right?
The truth is, when we talk about turning half round, we already claim that the strip has the character of facing direction on Z-axis, i.e. we already see it as 3D article, just it is too thin and flat to show 3D character.
*Important to note, it's not that a strip is originally only a 3D article, it is an N-dimension article. just by our observation, it collapses to this 3D status, because human perspiration is still limited to no higher than 3D at the moment.
At the moment we twist the strip, the already existing 3D character is finally made presented to our intuition.
Thus we can define the essence of the behaviour turn / spin / twist as:
It is changing facing direction of two relative points of one object on the third dimension's direction.
It is revealing its character of higher dimension.

Well, Möbius strip case is still a bit complicated to dig my following deduction.
Because if we lay the strip flat, define the direction of long side as axis L, the short side as axis W,
to form Möbius strip it takes 1 round on L direction and 1/2 round on W direction.
Let's study chain-1 instead, which is only 1 round on L direction, 0 on W direction as a whole.

Like we said, chain-1 is a simple ring.
No doubt it's a 3D article. Why? The change of surface direction along L axis.
In a normal stretching case without human interference, the direction change is a continuous one.
When we condense the change of direction to certain points, as I experimented at the beginning of this project, the continuous change turns into discrete changes, which are foldings.
Folding is an ultimate method to pull two different point meet on the third dimension axis, in another word, folding eliminates a difference on third dimension character, makes the 3D object collapse into 2D flat.
It can collapse on two points to be flat ( as single fold doesn't cause change of direction higher than 1/2 round ) or more points. As long as the total change of direction equals 1 round, the ring remains existing in 2D.
Now if we go back and review why chain-1 can change to different structures, it is actually a simple 3D object, by folding, collapsing at different points. Since there could be countless points along the chain when we zoom out, no doubt it has countless possibilities to collapse into a 2D version.
*In fact, chain -1 folds with a 45 degree angle along L axis, so it actually involves also folding on W-direction with each fold. But the conclusion stands the same.